こんにちは!ワーママゆきゃです。
前回のブログで、こどもパソコンIchigoJamでタミヤのカムロボ(カムプログラムロボット)の進み方をプログラミングすることにチャレンジしました。

今日はIchigoJamでカムロボの腕(アーム)を動かしてみたので、そのお話をブログに書きたいと思います。
今回はサーボモーターの取り付けとサーボモーターの制御についての内容なので、「カムロボにIchigoJamを乗せるのがまだだよ」という方は前回のブログを先にご参照ください^^
ちなみにサーボモーターでアームを動かすプログラミングは、前回の進み方を変えるプログラミングより難しく感じました^^;(いまだに理屈はあまり理解していませんw)
それでも決まった幅だけアームを動かす分には、前回同様こどもも一緒にプログラミングに取り組むことができました。
 ゆきゃ
ゆきゃ私はプログラミング未経験の文系ママなので難しいことはできませんが、子どもたちとゆるく楽しみながらプログラミングをやっています。
IchigoJamでカムロボを動かすにあたってカムロボ部のサイトを参考にさせていただいています。
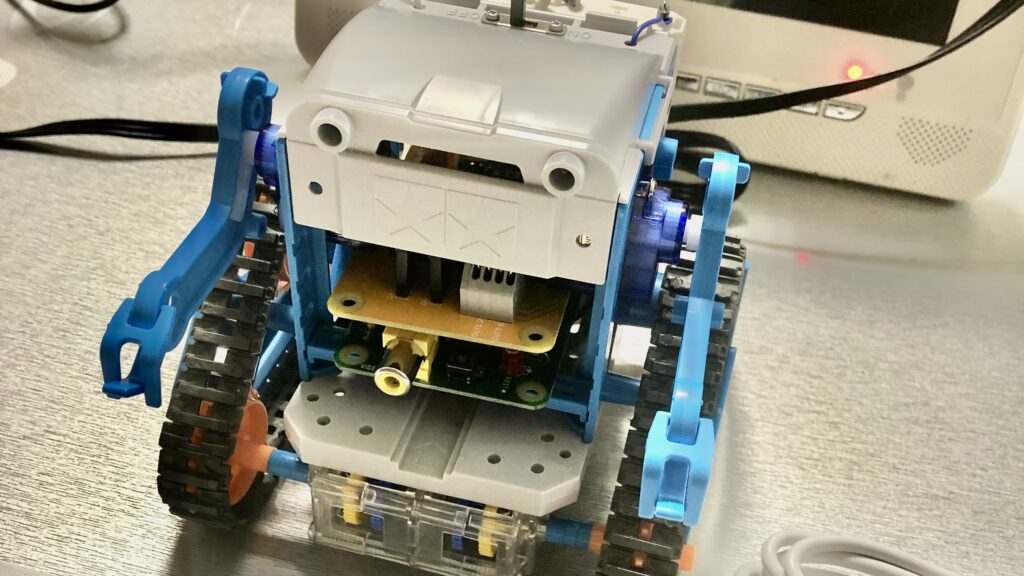
カムロボにサーボモーターを取り付けよう
カムロボのアームを動かすためにサーボモーターを取り付けます。
サーボモーターはカムロボ部のサイトで紹介されていた「マイクロサーボ9g SG-90」を秋月電子通商さんで購入しました。左右のアームに取り付けるので2つ用意します。
取り付けはカムロボ部で説明されているとおりに行っています。

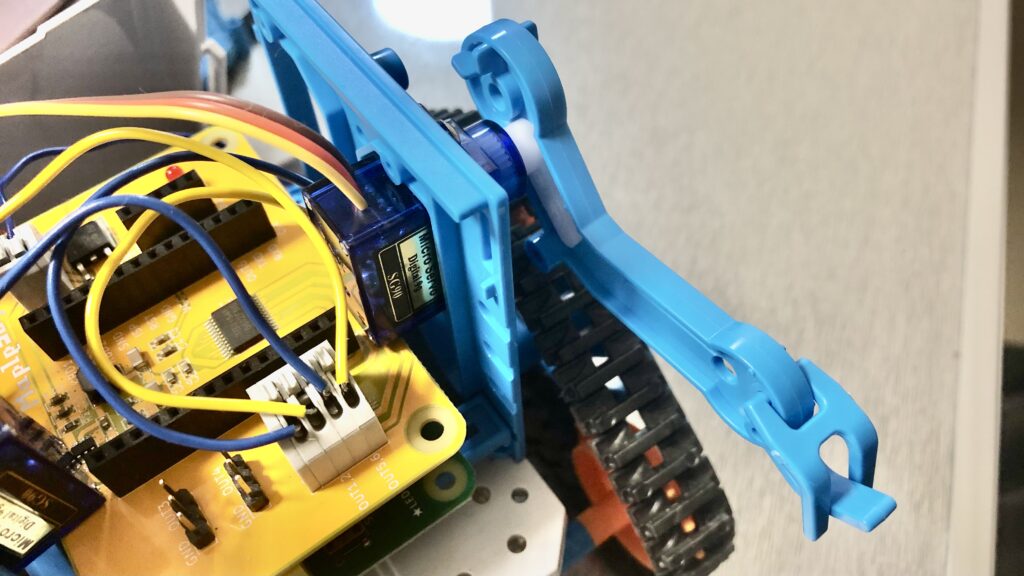
取り付けは難しくはありませんでした。しいて言えば、アームにくっつける白いパーツの向き(表裏)が分かりにくかったです。
写真でも少しわかりづらいかもしれませんが、アームを白いパーツに添わせるように取り付けるので凸側が本体の方を向くように取り付けます。
サーボモーターで腕を動かそう
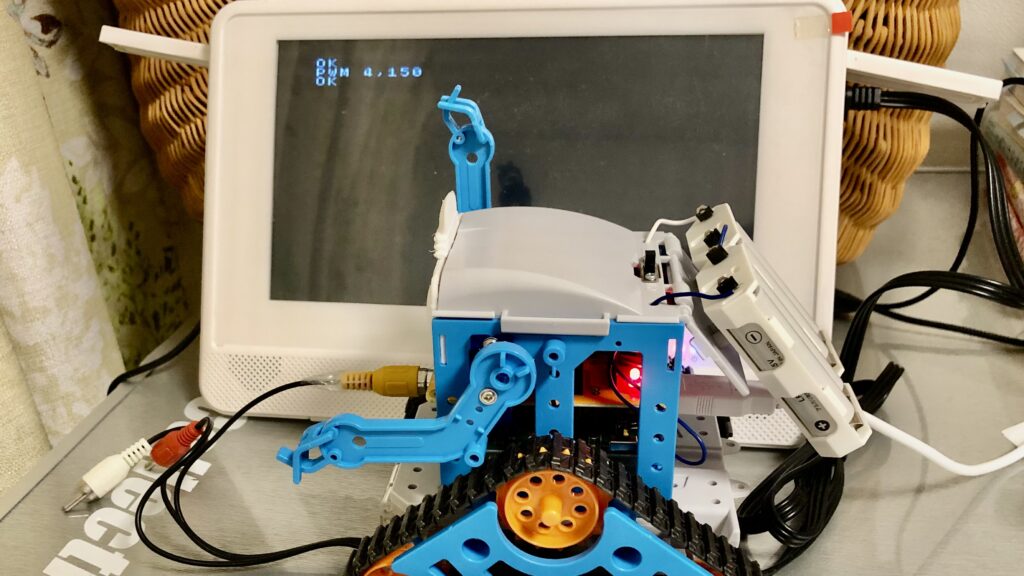
サーボモーターを動かすにはPWMコマンドを使います。
右アーム PWM 4, 50~240
左アーム PWM 3, 240~50
右アームが一番前にある状態がPWM 4, 50です。逆に一番後ろにある状態がPWM 4, 240となります。50~240で好きな数字(振れ幅)を指定できます。一番前の50の位置から+100動かしたPWM 4, 150だと右アームを真上に挙げている状態です。
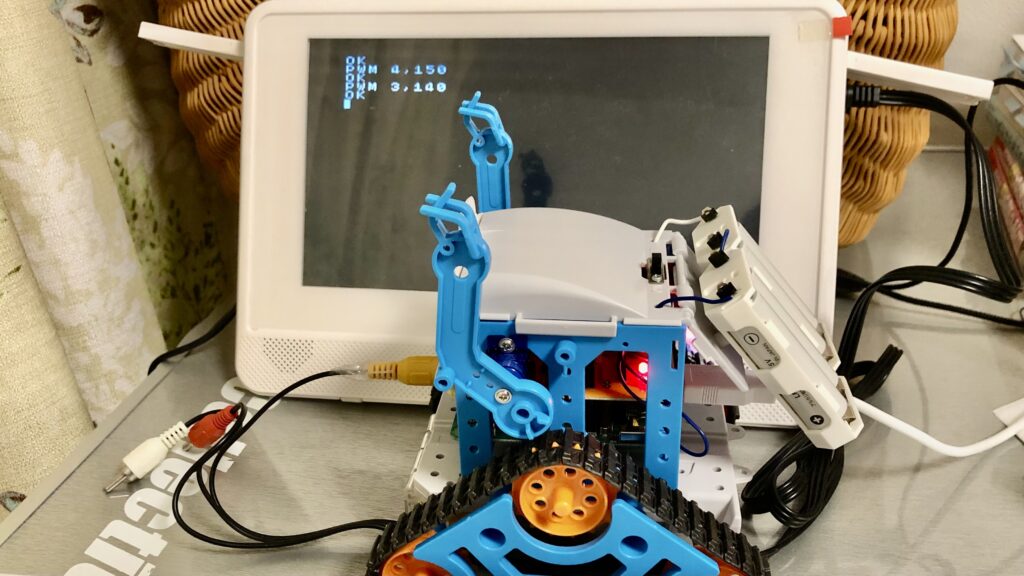
左アームは、一番前にある状態がPWM 3, 240、一番後ろにある状態がPWM 3, 50です。240~50で数字(振れ幅)を指定します。右アームと同じように真上に挙げる場合、一番前の240の位置からー100動かしたPWM 3, 140にします。
例えば、カムロボのアームを歩く時のように左右交互に振らせるときは次のようなプログラムをつくります。
10 PWM 4, 150 : PWM 3, 240 : WAIT 30
20 PWM 4, 50 : PWM 3, 140 : WAIT 30
30 PWM 4, 150 : PWM 3, 240 : WAIT 30
40 PWM 4, 50 : PWM 3, 140 : WAIT 30
50 PWM 4, 150 : PWM 3, 240 : WAIT 30
60 PWM 4, 50 : PWM 3, 140 : WAIT 30
(2行ずつ繰り返す)
このプログラムをF5キーで実際に動かすと、「右アームを上げて左アームを下げた状態で0.5秒」→「左アームを上げて右アームを下げた状態で0.5秒」を入力した行の数だけ繰り返していきます。
同じプログラムを何度も入力するのは大変なので、繰り返しの構文を使うと以下のプログラムになります。(これは左右一回ずつ上げる動作を5回繰り返しています)
10 FOR I=1 TO 5
20 PWM 4, 150 : PWM 3, 240 : WAIT 30
30 PWM 4, 50 : PWM 3, 140 : WAIT 30
40 NEXT
さらに前に進みながらアームを振るようにするには前に進むOUTコマンドを追加します。
10 FOR I=1 TO 5
20 OUT 33 : PWM 4, 150 : PWM 3, 240 : WAIT 30
30 OUT 33 : PWM 4, 50 : PWM 3, 140 : WAIT 30
40 NEXT
進む方向を指示するOUTコマンドと異なり、PWMコマンドは振れ幅を計算して入力しなければならないので少し難易度があがりますね。
でも、アーム操作は上げると下げるが中心になると思うので、以下の4つのプログラムだけでもカムロボの動作をいろいろとアレンジできました。
右アームを上げる・・・PWM 4, 150
右アームを下げる・・・PWM 4, 50
左アームを上げる・・・PWM 3, 140
左アームを下げる・・・PWM 3, 240
おわりに
今回も小2長女と一緒にプログラミングにチャレンジしました。
アームを動かすのもやっていましたが、ひたすらぐるぐると旋回させるのが楽しいみたいです。(10秒間ひらすら右旋回とかさせて爆笑していますw)
ロボットプログラミングは、おもちゃを自分が考えたように動かすことができてとても楽しめています!次女も「こんな動きをしてほしい!」と長女にリクエストして一緒に遊んでいました^^
今日も読んでいただきありがとうございました。
※IchigoJamはjig.jpの登録商標です。
【参照】
こどもパソコン IchigoJam – はじめてのプログラミングパソコン
カムロボ部
【画像引用】
IchigoJamロゴ|jig.jp